人間と徐々に呼吸リズムが同期する呼吸ロボットの開発
1. 背景・目的
呼吸動作を行うロボットとのインタラクションは、不安軽減に効果的であり、研究されている。特に、一定のリズムで呼吸動作を行うロボットを抱きしめることは、人間に最適な呼吸リズムを促し、不安を軽減することが知られている。また、呼吸速度の変化はロボットの生物らしさを上昇させることができ、不安軽減効果の向上が期待できる。
そこで、人間の呼吸リズムに徐々に同期する呼吸ロボットを抱きしめることで、生きていると感じさせることができ、不安をより軽減できるのではないかという仮説を立てた。本研究では、人間の呼吸リズムに徐々に同期する呼吸ロボットを開発する。
2. 手法
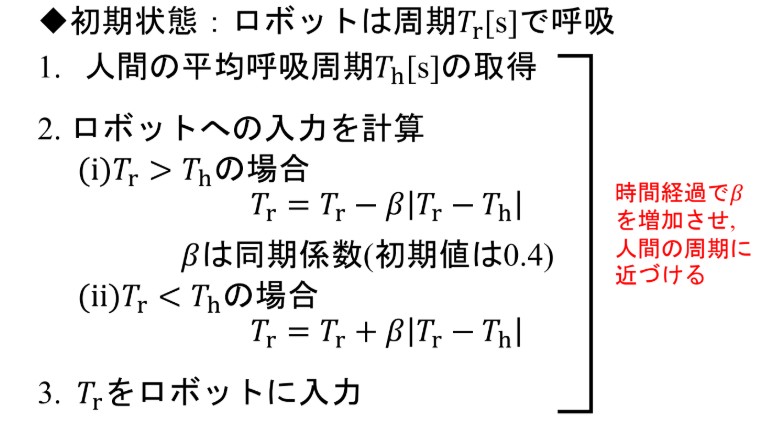
本研究で用いた呼吸同期システムを図1に示す。
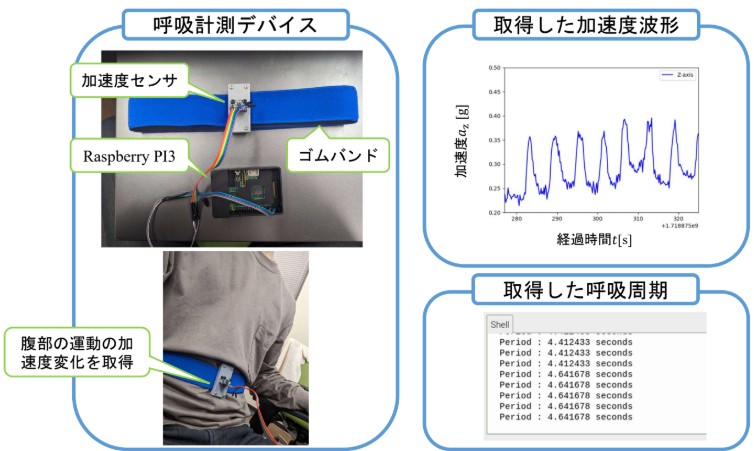
また、呼吸周期の取得は図2に示す呼吸計測デバイスを製作し、行った。加速度センサを用いて計測を行い、時系列グラフに出力することでピーク点間の時間を取得し、呼吸周期とした。
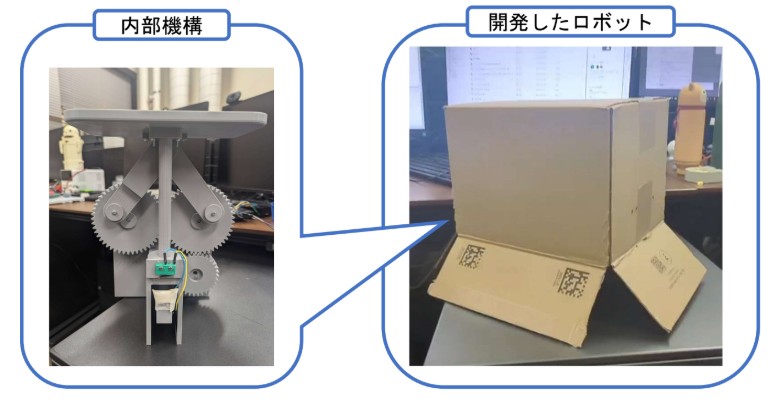
開発した呼吸動作を行うロボットを図3に示す。モーターの回転を単振動の動作に変換する機構を用いて、人間が呼吸する際に生じる腹部の動作を再現した。
3. 実験
本研究のシステムでは呼吸を完全に同期させることができなかった。呼吸を同期させるためには、周期とタイミングの同期が必要である。しかし、本研究のシステムでは周期の同期は実現できたが、タイミングの同期を実現することができなかった。そのため、本実験では、ロボットの呼吸速度の変化がユーザー自身の呼吸によって変化した場合、ユーザーが感じるロボットの生物らしさにどの程度影響を与えるか調査した。また、呼吸計測デバイスの性能の検証も行った。実験参加者は研究室内のメンバー5人とした。
3.1 実験手順
- ロボットの呼吸動作を実演し、ロボットが呼吸をしていると説明
- 呼吸ロボットのパラメータ設定
- 呼吸同期システムの体験
- アンケート調査
4. 結果
4.1呼吸計測デバイスの性能検証
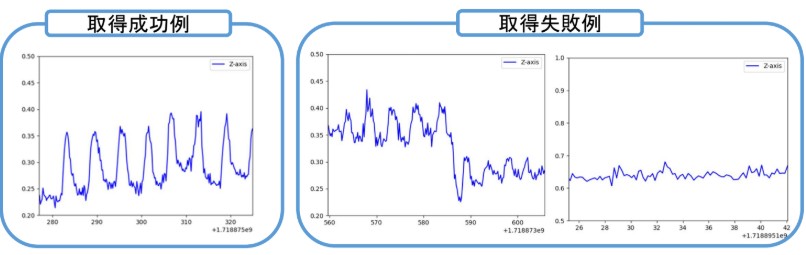
実験参加者5人中4人で計測に成功した。図4に成功例と失敗例を示す。失敗例では姿勢や計測デバイスの取り付け位置により、波形が変化してしまい、ピーク点を適切に検出することができなかった。
4.2 アンケートによる、生物らしさへの影響の調査
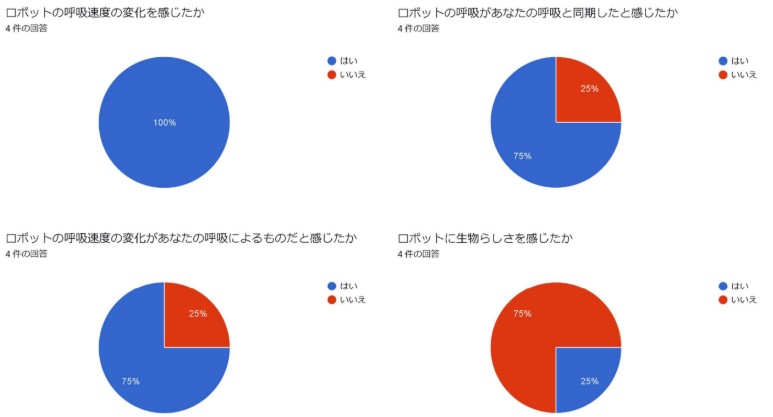
図5に実施したアンケート調査とその結果を示す。
5. 考察
ロボットの呼吸速度の変化があなたの呼吸によるものだと感じたかの結果がはい:75%、ロボットの呼吸があなたの呼吸と同期したと感じたかの結果がはい:75%となった。本研究のシステムでは、ロボットと人間の呼吸の同期を再現できていないにもかかわらず、ロボットの呼吸が同期したと感じるユーザーが多かった。また、いただいたコメントの中にロボットに呼吸がつられてしまうという意見があった。このことから、人間の呼吸速度によってロボットの呼吸速度が変化する事と、ロボット自身の呼吸の誘導効果によって、同期している感覚が生まれたのではないかと考えられる。
また、ロボットに生物らしさを感じたかの結果がいいえ:75%だった。加えて、いただいたコメントの中に外観が生物らしくないという意見や、呼吸動作には見えないという意見があった。そのため、呼吸動作のみで生物らしさを生み出すのは難しく、外観の工夫が必要であると考えた。
6. まとめ
本研究では、人間の呼吸リズムに徐々に同期する呼吸ロボットを開発し不安を軽減することを目指したが、実現することができなかった。呼吸リズムの同期には周期とタイミングという2つの同期が必要であり、前者は実現できたものの、後者の実現には至らなかった。そのため、本研究では、ロボットの呼吸速度の変化がユーザー自身の呼吸によって変化した場合、ユーザーが感じるロボットの生物らしさにどの程度影響を与えるか調査した。結果は本研究で開発した呼吸動作システムでは生物らしさを生み出すことは難しかった。