ロボットによるユーザーへの撫で返しシステムの開発
1.背景・目的
技術的に「癒し」を実現する手法のひとつとして,セラピーロボットやペットロボットがあげられ,Qooboやaiboなどが知られている.これらのロボットは,ユーザーの動作に応じてしっぽを振ったり嬉しそうな表情を見せたりと,視覚的アプローチを利用して反応する.ここに,ユーザーが撫でるという動作そのものを生かした触覚的アプローチによる反応を取り入れることで,ユーザーとのコミュニケーションをより強固にできるのではないかと考えた.
そこで本研究では,ロボットに対する信頼度向上を目指し,ユーザーの撫でる速度に合わせた速度で撫で返すロボットの開発を目的とした.
2.手法
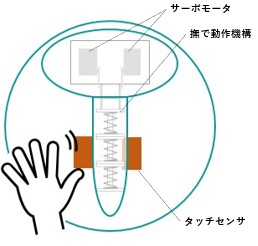
図 1のようなロボットの制作を目標とした.ユーザーの撫で速度計測,提示速度に応じた撫で動作速度の調節,撫で動作機構の制作の3点を中心に制作に取り組んだ.
2.1.ユーザーの撫で速度計測
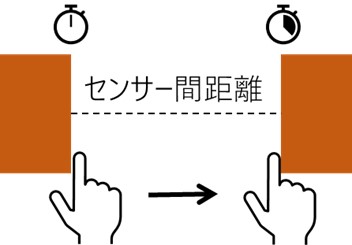
導電性テープを用いて,静電容量方式のタッチセンサを作成した.タッチセンサは図 2のように2つ配置した.ユーザーが2つのタッチセンサを触るための移動にかかる時間から,撫で速度の計測を行った.
2.2.提示速度に応じた撫で動作速度の調節
本研究において撫で動作機構に用いたサーボモータ(MG996R)の速度調節を行った.モータ制御にはArduino UNOを使用し,サーボモータの速度制御に特化したライブラリ(VarSpeedServo.h)を利用した.
ライブラリ上の設定速度と実際の動作速度の関係を数式化し,ユーザーがロボットを撫でた速度と等しい速度で撫で返す速度を調節できるようにした.
2.3.撫で動作機構の制作
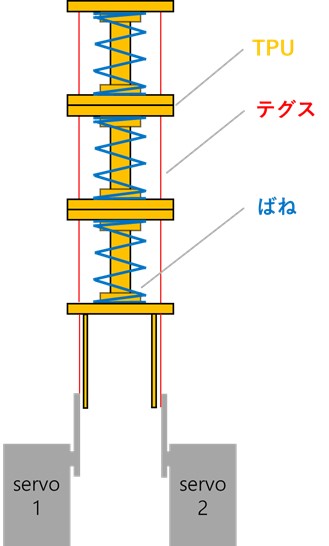
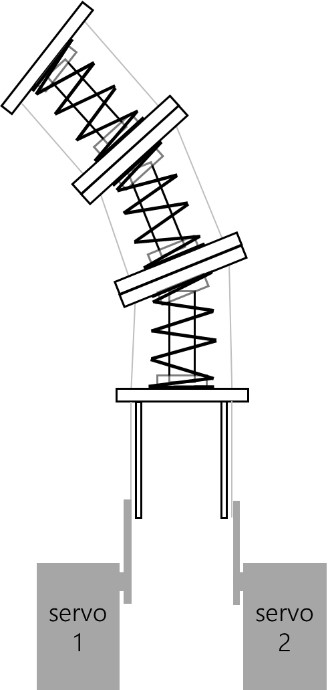
サーボモータ,ばね,TPUのパーツ(3Dプリンタを用いて制作)を図 3のように組み合わせて制作した.サーボモータを動作させるとテグスがモータ側に巻き取られ,図 4のように変形する.これを繰り返すことでロボットによる撫で動作を実現した.
3.まとめ
ユーザーの撫でる速度に合わせた速度で撫で返すためのプログラムの制作と,撫で動作を行うための機構の開発を行った.一方で開発した撫で動作機構を用いて速度調節を行うまでには至らなかった.
今後は当初の目的の達成を目標とし,実際の使用感を評価する実験を行いたい.