- 題目
重心移動に着目した球体型ロボットの走行安定化
- 背景
球体型ロボットは球体を外殻に持ち、内部に駆動用の機構を有する移動ロボットである。その形状ゆえに安全性が高いというメリットがあり、教育用ロボットなどに利用されている。また球体型ロボットは車輪型ロボットに比べて走破性が高く全方向への移動が可能であるということから、月面探査用のローバーや次世代の車用タイヤとしての応用も期待されている。
球体型ロボットの機構には大きく分けてジャイロ型と重心移動型の2種類がある。重心移動型の中には球体内に車を設置し、それが内側の球面を走ることで重心移動を実現するものがある。このタイプのロボットでは動きにふらつきが生じたり、動く方向に偏りがあるという特徴が確認できている。この現象は内部の駆動用車両の制御が球体型ロボットの制御に直接反映されていないことを意味しており、駆動用車両ロボットの重心位置に起因している可能性が考えられた。そこで内部の車両ロボットの重心位置をレスポンシブに変えることができれば、球体型ロボット特有のふらつきを抑えることができて、またそれによりロボットの操作性の向上も見込める。このように球体内部の車の重心位置に着目し、ロボットの安定化を目指した研究は未だなされていない。
- 目的
重心移動型球体ロボットにおいて、その内部の車両ロボットの重心移動をすることによって、球体ロボット走行時の姿勢を安定化する。
- 手法
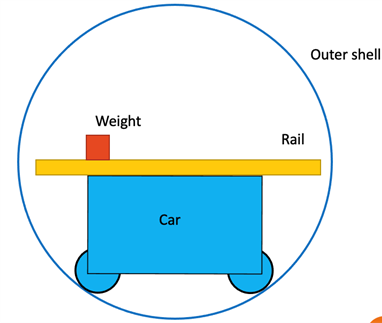
ロボット内部の車両上部にレールを敷き、その上を錘が移動することで、重心移動を実現する。ロボット走行時に連続的に発生する揺れを抑えるために、ロボットの傾きをセンシングし、観測値から錘の速度レベルについてフィードバック制御を行う。
- 開発(ハードウェア)


写真のような球体型移動ロボットを作成した。内部の車両ロボットは二輪駆動で、上部のローラーと駆動輪の4点で球面と接地する。
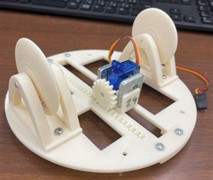
また重心移動機構を図のように設計し、これが車両ロボットの最上段に搭載されている。真ん中に見えるのが錘で、それがレール状をスライドするように動く。このロボット作成に伴って、回路基盤やフレームなども設計した。
- 開発(ソフトウェア)
ロボットの傾きをセンシングして、それに対してフィードバック制御を行った。その概要を以下の図に示す。
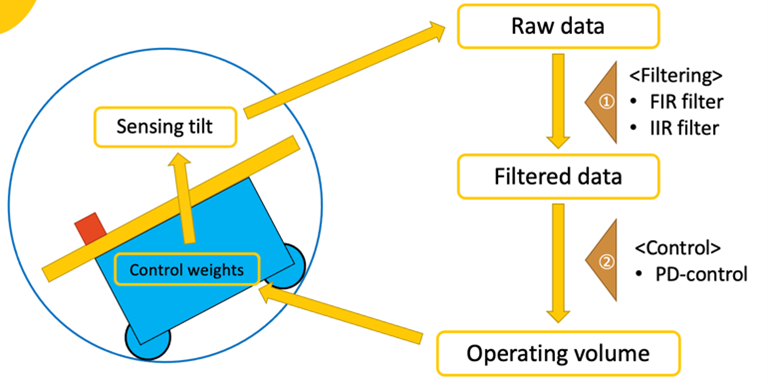
具体的には、まずセンサー値に対してフィルター処理を行い、モーター振動から発生するノイズを除去した。ノイズ除去に関しては、ハード的な処理とソフト的な処理を施すことで、振幅ベースでノイズを1/30に抑えることに成功した。これを用いてPD制御をすることで、姿勢の安定化を試みた。
- 結果
ロボットの傾きからPD制御により重心移動を行うことで、ロボットの揺れを抑えることに成功した。またP制御のみの場合だと、逆に揺れが発散してしまうことがわかった。
- 考察
球体ロボット内部の車両ロボットの重心移動に着目することで、ロボットの揺れを制御できることがわかった。またP制御・D制御それぞれの係数を変えることで、その揺れの収束時間であったり発散の度合いを変えることができるということがわかった。この揺れを抑えることでのメリットは、球体ロボットの操作性の向上という点が大きいと考えらえる。揺れが抑えられることで、ロボットを操作する点でも不規則な動きが抑制できるのではないかと考えられる。
- まとめ
今回は揺れを抑えることを主目的として進めてきたが、この「揺れ」というのは球体ロボットの大きな特徴であり、他の一般的な車輪型ロボットなどでは表現できない点である。今後はこの揺れをコントロールすることで、それが人に与える印象の違いなども研究していければと思う。