人-ロボット間におけるあくび伝染再現システムの開発
1.背景及び目的
現代社会では人とのコミュニケーション相手としてロボットを選ぶ選択肢が普及しており、人とロボットが共に過ごす時間は増加している。この傾向は今後も強まると予想され、長期間信頼関係を構築できるエージェントの開発が必要とされている。
人からロボットに対する好感度度を上昇させるために、カメレオン効果と呼ばれる対話中に対話相手の非言語的コミュニケーションをさりげなく模倣することで対話相手からの好感度が上昇するという心理現象を用いた研究が数多く行われてきた。カメレオン効果は人-ロボット間でも効果が実証されている一方で、人は自分のしぐさをあからさまに模倣されたときに不快に感じてしまう。
また、カメレオン効果に関連する現象として伝染性のあくびが存在する。伝染性のあくびは深い人間関係において発生しやすく、これも一種の模倣行動である。しかし、伝染性のあくびは対話相手から模倣に気づかれる動作でありながらも相手に好印象を抱かせることができる。
そこで本研究ではカメレオン効果と伝染性のあくびの知見を用いて、人からロボットへのあくびの伝染が長期的な信頼関係の構築に寄与する可能性を模索し、人からロボットへのあくびの伝染によって人のロボットに対する好感度の上昇度合いを検証することを目的とする。
2.手法
本研究ではあくびの検知システム、あくびの動作を行うロボットを作成する。また、それらの作成物を用いた実験を通してロボットに対する印象調査を行う。
3.開発
今回の研究ではあくび検知システムとあくび動作を行うロボットを開発した。
3.1.あくび検知システム
あくびの検知はwebカメラから得られた情報に画像処理を用いて行った。プログラムはpythonによって記述し、OpenCVとdlibのライブラリを使用している。具体的なシステムのプログラミングチャートは下の図1の通りである。
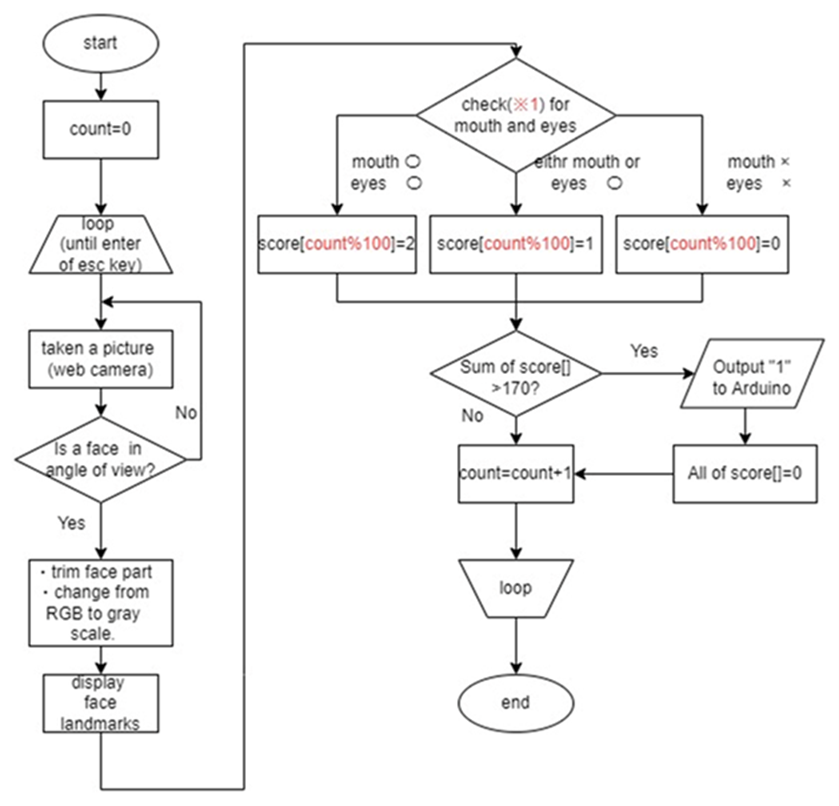
今回のプログラムでは最新の100回の画像処理の結果からあくびの動作を判断した。1回あたりの画像処理では各目の縦横比の和と口の縦横比のそれぞれに閾値を設定して最大2点で採点を行うため、最大200点のスコアが判断に用いられている。このスコアに対しても閾値を設定しており、閾値を超えた場合はシリアル通信を用いてロボットの動作を制御するマイコンに出力がされる仕組みになっている。
3.2.あくび動作ロボット
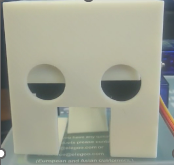
あくび動作ロボットは外装を主に3Dプリンタによって作成し(図2)、2つのサーボモーターがそれぞれ目と口の動作に用いられている。あくびの動作はロボットの瞼が徐々に下がり、口がゆっくり大きく開くことで再現した(図3)。二つのモーターを制御するマイコンにはArduinoの互換ボードであるELEGOO UNO R3を用いた。

4.実験
人からロボットへのあくびの伝染による人のロボットに対する好感度の上昇度合いを検証するために、実験を行った。実験では特定の状況を設定し、参加者に実際にあくびをしてもらった後にロボットに関する質問への回答を依頼した。尚、質問の内容は以下の通りである。
①ロボットの動作があくびであることが分かったか(はい/いいえ)
②ロボットにあくびを模倣されたことについての印象(不快~好感までの5段階評価)
③自由記述
5.結果
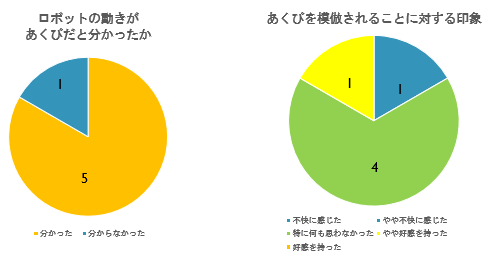
実験結果として、実験参加者の6名のうち5名がロボットのあくびの動作を認識した。また、あくびを模倣されたことに対する印象については、やや不快に感じたのが1人、やや好感を持ったのが1人、特に何も思わないと回答したのが4人であった(図4)。
6.考察
今回の実験結果からは、あくびの伝染によって人のロボットに対する好感度が上昇することは実証されなかった。今回、検証がうまくいかなかった要因としては、実験の内容が参加者にいきなりあくびをしてもらう内容であったため、参加者が不自然に感じてしまったこと、作成したロボットが持つ機能があくび動作のみであったため、ロボットとのインタラクションが乏しかったことが挙げられる。
7.まとめ及び感想
本プロジェクトではカメレオン効果と伝染性あくびの知見をもとに、システムを作成して、人からロボットのあくびの伝染による人のロボットに対する印象を調査した。しかしながら、多数の改善点が見受けられたため、今後はロボット本体の改良による機能の追加、実験内容の再考の必要がある。
FTMPを通してテーマの設定から発表までの一連の流れを経験することで研究の困難さ等、多くのことを学ぶことができた。この経験を卒業研究をはじめとして、今後の研究活動に活かしたいと思う。