Design a system for guiding the user to breathe deeply to achieve distraction effect.
1. Background and purpose
Social assistance robots have begun to be widely used in healthcare. Faced with upcoming medical procedures, people are prone to be in a state of anxiety, especially children. One of the most classic and best-fitting scenarios is that vaccination may be a painful and stressful moment for people. In this process, clinicians usually use non-medicinal methods to deal with pain by distracting, that is,distraction policy. Therefore, I assume here that a program can guide the user to breathe deeply to achieve distraction.
2. Method
The system includes a data measurement part and a human-computer interaction part.
2.1 Data measurement part
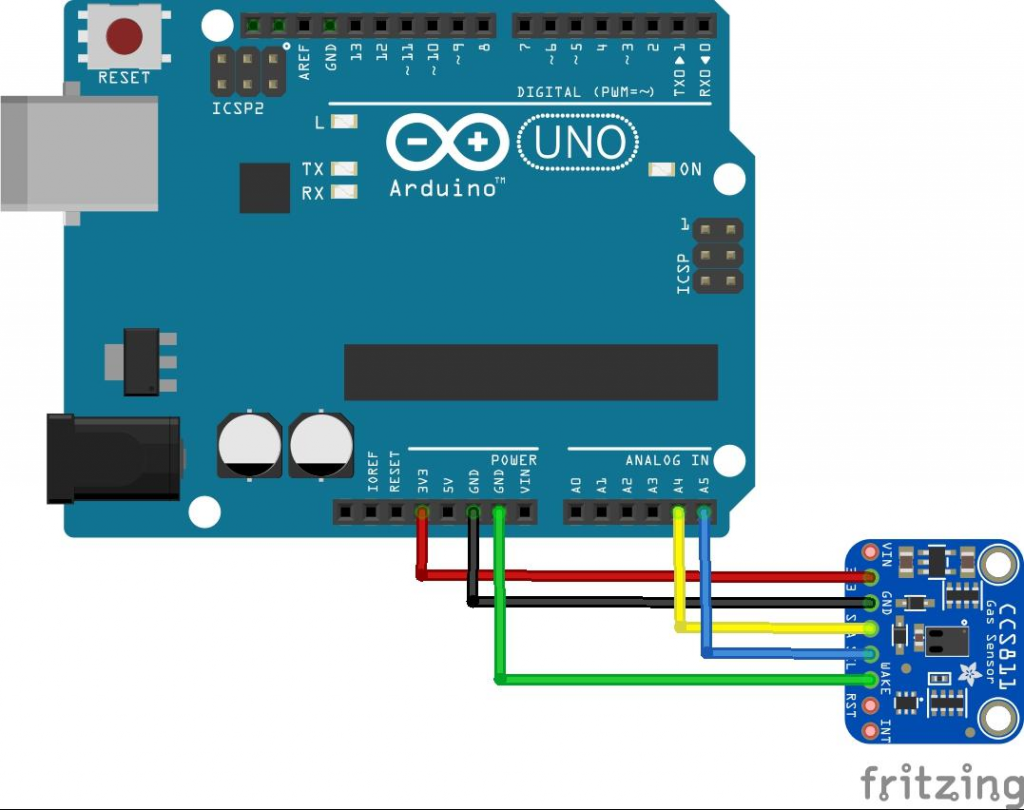
The data measurement part uses a CO2 sensor (CSS811) and Arduino to measure the user’s breathing in real-time. The wiring diagram is shown in pic1. When I used the sensor, I found that the sensor is greatly affected by the environment, and the limitations are embodied in the following two points.
1) Before each use, the sensor needs to be turned on for about 20 minutes to achieve the purpose of obtaining data stably.
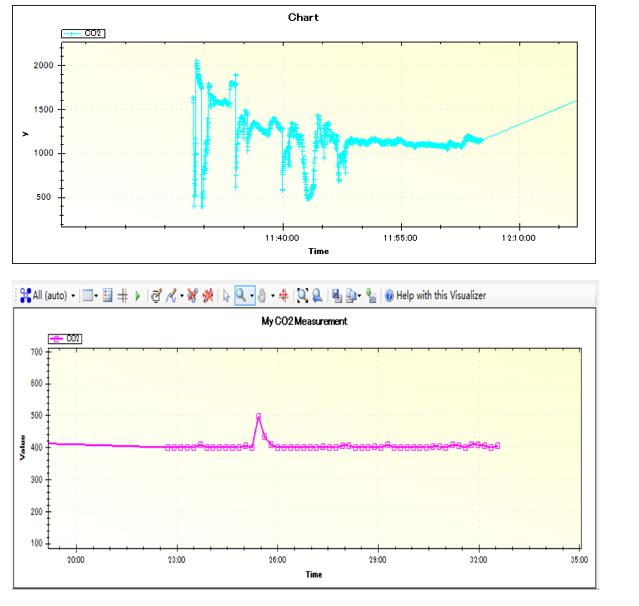
2) Data collection is unstable. This point has been greatly improved through pre-processing, The result is shown in pic2.
2.2 Human-computer interaction part
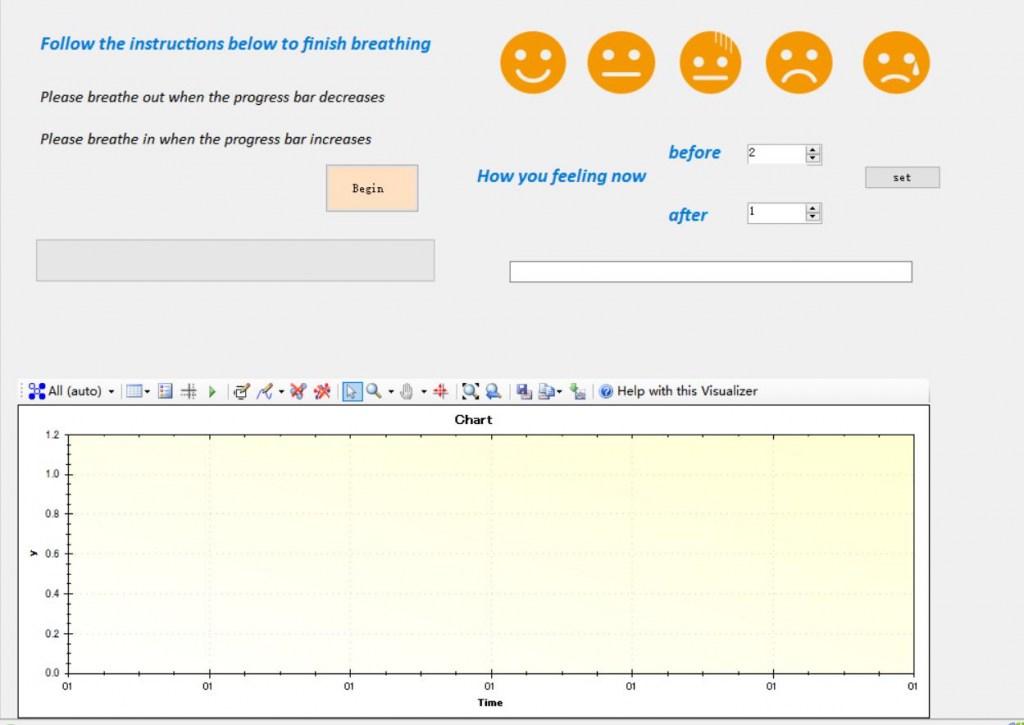
In the human-computer interaction part, I used Megunolink software to design the human-computer interaction interface, and the data can be fed back on the interface in real time.
The system guides the user to take a deep breath through text, and I introduced a voice feedback system. When the sensor does not get the data, it will trigger “Maybe something went wrong, please try again”. When the sensor receives the data, it will trigger ” You did a good job”,the interface design is shown in pic3.
3. Result
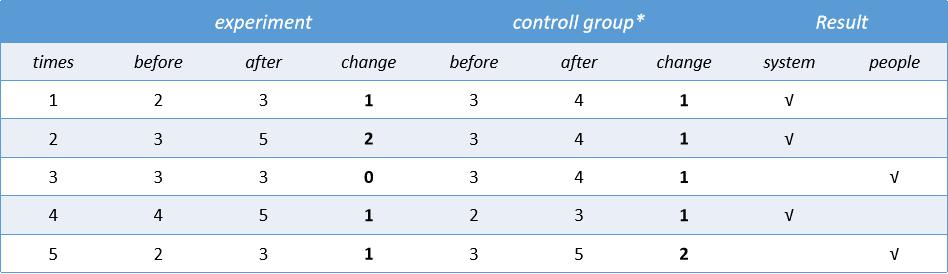
I conducted 5 experiments, and the results are shown in Table 1. Comparing which one is more effective for distraction by the system and by a real person, 3 people showed that the system is more effective.
4. Comment
During the experiment, I got suggestions from the participants for the evaluation and optimization of the system.
1) In order to keep the data from being imaged by the environment, using the sensor requires a very close distance (within 20cm).Therefore,users who face the sensor directly are nervous and sometimes encounter it will cause it to stop working suddenly. Perhaps I should consider making the collection part an interesting device with a shell.
2) Although there is a link of voice interaction, person’s guidance is more emotional and relaxing.
3) Sensing data through gas sensors alone does not accurately judge the user’s mood. Heart rate may also be a good data to reference if I want to make the sensor part into a device and the user guidance – progress bar Self-evaluation data has a chance to touch it.
5. ConclusionThrough these two months of experience in Tanaka lab, I learned how to conduct research from beginning to result.This will be of great help to my research life in the future, and throughconstant discussions with other people during the two months, I have also learned to think in different way.