変温するロボットハンドの製作と安心感への影響
1.背景と目的
近年、ロボットが社会の様々な場面で多様な役割を担うようになってきている。そのような社会では、人とスムーズに親密な関係を築くことのできるロボットの必要性が増加していくだろう。そこで、人のロボットに対する警戒心を効率よく解くために、安心感を与えられるようなロボットの開発が必要である。
人が実際に他人に対して安心感を感じる場面として、友人や家族に手を握ってもらう場面が挙げられる。手を握ってもらった時に人が知覚する手の要素として「温度」、「感触」、「握力」などがある。
そこで、今回はこれらの要素のうちの「温度」に着目し、次の2点を目的として、プロジェクトを進めていく。
1.変温機能とアクチュエータを備えたロボットハンドの製作
2.人が安心感を抱くロボットハンドの外装温度の調査
2.ロボットハンドの制作
2.1ロボットハンド
図1にロボットハンドの図面を示す。
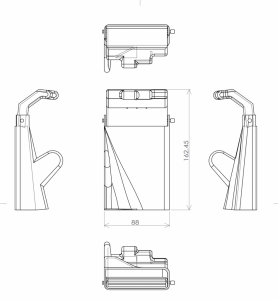
図1 ロボットハンドの図面
2.2温度制御
ロボットハンドの加熱を行うヒーターには「アルミ箔フレキシブルヒーター A6」を使用し、温度センサーには「高精度IC温度センサ LM35DZ」を使用した。図2は温度制御を行う回路である。図3は温度制御に関するフローチャートで、ヒーターに流す電圧はPWM制御により制御を行なった。
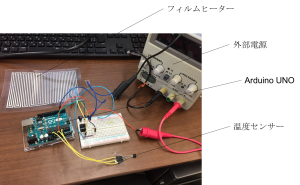
図2 温度制御回路
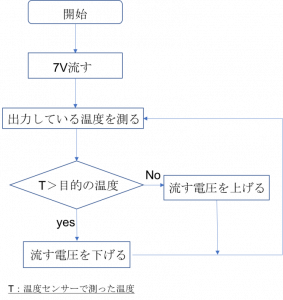
図3 温度制御に関するフローチャート
2.3アクチュエータ
アクチュエータに用いるサーボモーターには「FEETECHFS90 マイクロサーボ」を使用した。図4はサーボモーターを制御する回路の図で、サーボモーターは可変抵抗を回転させるとそれに伴って動作をする。また、図5はアクチュエータの機構を表した図で、サーボモーターが回転すると、紐が引っ張られハンド(指)が閉じる。ハンドには弾性のあるプラスチック板を取り付けられていて、サーボモーターによる負荷がなくなると、ハンドは元の状態へ戻る。
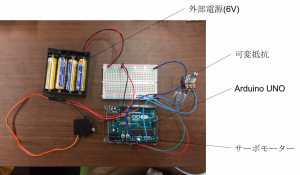
図4 サーボモーターの制御回路
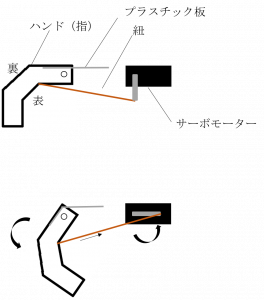
図5 アクチュエータの機構
3.4組み立て後
図6は温度制御回路とアクチュエータを取り付けたロボットハンドである。実験時には、実験参加者が触れる部分の温度の計測を行う必要があるため、温度センサーはロボットハンドの表側に取り付けた。また、ヒーターはロボットハンドの内側に貼り付けてある。
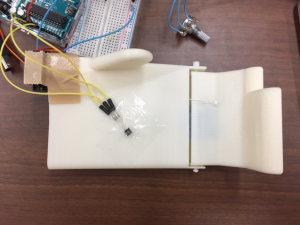
図6 組み立て後のロボットハンド
4.実験
4.1手法
本実験ではロボットハンドの外装温度がどういった温度の時に、実験参加者がどの程度安心感を感じるのかについて調査を行う。
実験では、実験参加者に16℃、25℃(室温)、36℃(体温)、40℃、50℃の5種類の温度ごとにロボットハンドとインタラクションを行ってもらい、安心感についてのアンケートに答えてもらった。温度は低いものから順に実験を行い、室温より温度の低い16℃はロボットハンドの中に保冷剤を入れることで再現した。また、今回の実験では実験参加者がロボットハンドの上に手を置き、ハンドが数回開閉を繰り返して実験参加者の手を握るような動作を行うことをインタラクションとした。
4.2安心感の評価方法
安心感の評価方法として、ヒューマノイドロボットに対する心理的安心感評価(上出ら 2015)から、本実験に適した質問項目を抜粋、編集してアンケートを作成した。質問項目は4つの快適性に関する因子と3つのストレスに関する因子に分かれている。実験参加者は各質問項目に6段階の尺度で回答をした。1は全くそうおもわない、2はそう思わない、3はややそう思わない、4はややそう思う、5はそう思う、6はかなりそう思う、と設定し、アンケート結果のうち、それぞれの因子のすべての質問項目の平均値を、その因子の得点として使用できる。また、アンケートの最後には自由記述欄も設けた。
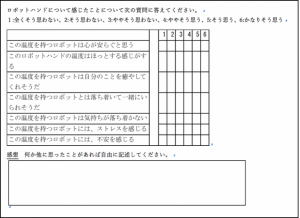
図7 実験で使用したアンケート
4.3結果
図8は快適性、ストレスについてのアンケート結果のうち、温度ごとにすべての質問項目の平均値をまとめたグラフである。また、図9に各因子の項目ごとのアンケート結果も示す。
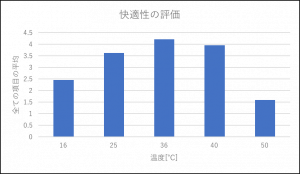
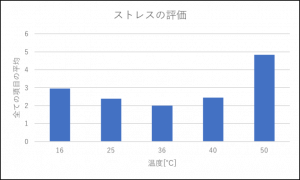
図8 快適性とストレスに関するアンケート結果
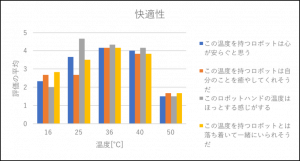
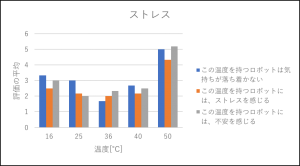
図9 各因子の項目ごとのアンケート結果
5考察
図8より、36℃の時に最も安心感の大きい評価が得られていることから、ロボットハンドは外装温度が体温に近いほど安心感を与えられるということがわかった。また、50℃では最も安心感が得られない結果となったが、自由記述欄で「温度が高すぎて怖かった」という記述が多かったことから、危険を感じてしまうような温度は安心感を与えることができないのだと考えられる。
図9はそれぞれの因子のうち、質問項目ごとの結果を表したものである。「このロボットハンドの温度はほっととした感じがする」という質問項目では36℃より25℃の方が安心感が大きい結果となっているが、これは16℃の次に25℃での実験が行われ、冷たい温度から常温へ温度が上がったことで、ほっとする感覚が強調されたためと考えられる。他にも、「この温度を持つロボットには不安を感じる」という質問項目でも36℃より25℃の方が安心感が大きい結果となっているが、これはロボットには体温はないという先入観のために、36℃の時に不安を感じてしまったのではないかと考えられる。
6まとめ
本研究では、変温機能を備えたロボットハンドを製作し、それを用いて実験参加者に安心感を与えるロボットハンドの外装温度を調査した。実験では16℃、25℃(常温)、36℃(体温)、40℃、50℃の5種類の温度で実験を行い、温度ごとにアンケートを実施した。結果として、外装温度が体温に近いほど安心感を与えることができるということがわかった。
今後の課題としては、外気温や被験者の体温とロボットハンドの外装温度の関係性、質感や握力を可変としたときの安心感への影響を調べることなどが挙げられる。また、実験に用いるロボットハンドも、指を5本にしたり、インタラクションしやすい形状に設計するなど、より質の高いロボットハンドを製作する必要がある。