Mochi:誇張した伸び縮みと形状変化を行うロボットの開発
1. 背景と目的
人とロボットの関わりを研究するヒューマンロボットインタラクション(HRI)では,ロボットやエージェントがユーザの自己開示を促すために,高い表現力を持つことや,ロボットが生きているような感覚を生み出すことは重要である。
ロボットの表現力を向上させるため、生きているような表現を行うアニメーションのテクニックである「アニメーション12原則」に着目した。このアニメーション原則をロボットに適応することで、ロボットの表現力を高めることを狙う。特にアニメーション表現の中でも「潰し伸ばし」と「誇張表現」に着目した。潰し伸ばし(Squash & Stretch) はキャラクターがつぶれたり伸びたりしながら形を維持することで、アクションに反応する動き 生きているような感覚を喚起する表現のことである。誇張 (Exaggeration) は動きや表情、形や動作の視認性を高め、より目立ちやすく、もっともらしくするもの キャラクターの感情をより深く伝え、説得力増すことができる。
ロボットの行動や感情を理解しやすくするために誇張表現が有効であるにもかかわらず、これまでの研究では、潰し伸ばしと誇張を組み合わせて用いたものはない。そこで潰し伸ばしといった動作を誇張し、さらに膨らんだり縮んだりすることで形状変化を誇張するロボット「Mochi」を提案し、実装した。本FTMPではMochiの実装についてと、今後の改良、応用などの展望を述べる。
2. 装置開発
潰し伸ばし、膨らみや縮みといった形状変化が行えるおもち型のロボット:であるMochiを開発した。
Mochiはアニメーション技法の表現である「潰し伸ばし」と「誇張」表現である「膨らみ」、そしてその2つを組み合わせた潰し伸ばしの誇張表現が行える。
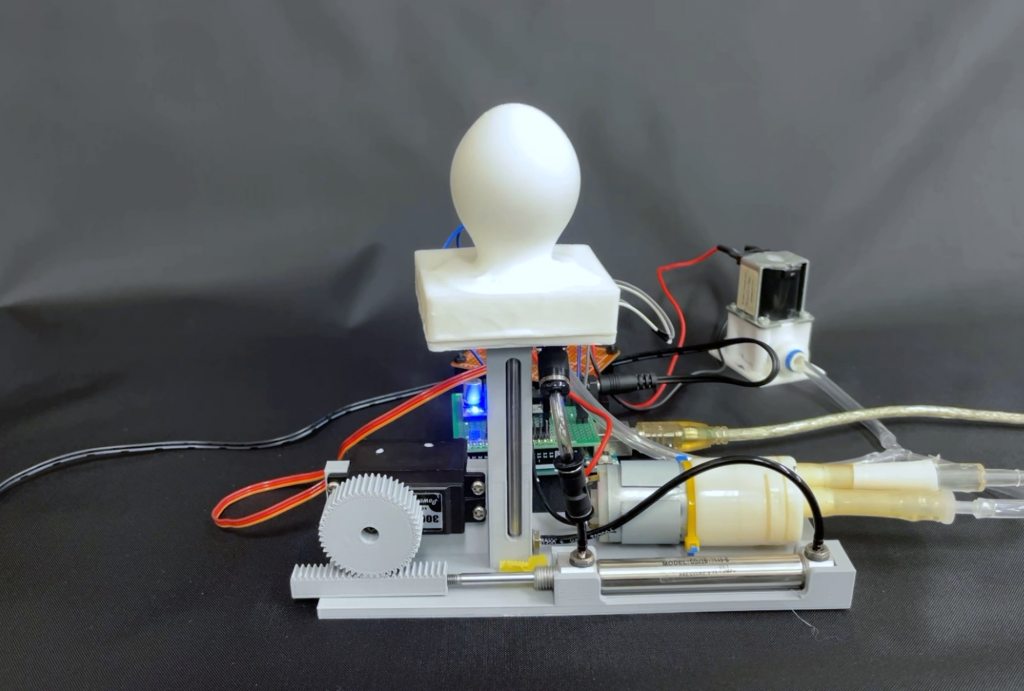
2.1. Mochi: 機構
潰し伸ばしの表現を行うために、2つのエアシリンダを用いて実装を行なった、本来のエアシリンダの制御はソレノイドバルブなどを複数組み合わせて位置制御を行う。しかし本開発においては2つのエアシリンダを組み合わせることで、それぞれの先端位置を伝達させ、サーボモータにより先端の位置制御を行なった。
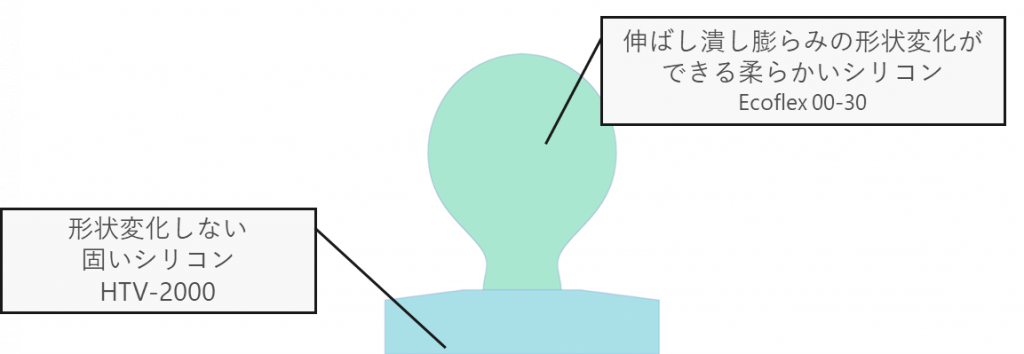
2.2. Mochi: 外装
潰し伸ばしや膨らみといった表現を行うため、シリコンを利用した。形状変化が必要な本体上部は柔らかいシリコンを利用し、形状変化が望ましくない本体下部は硬いシリコンを利用した。
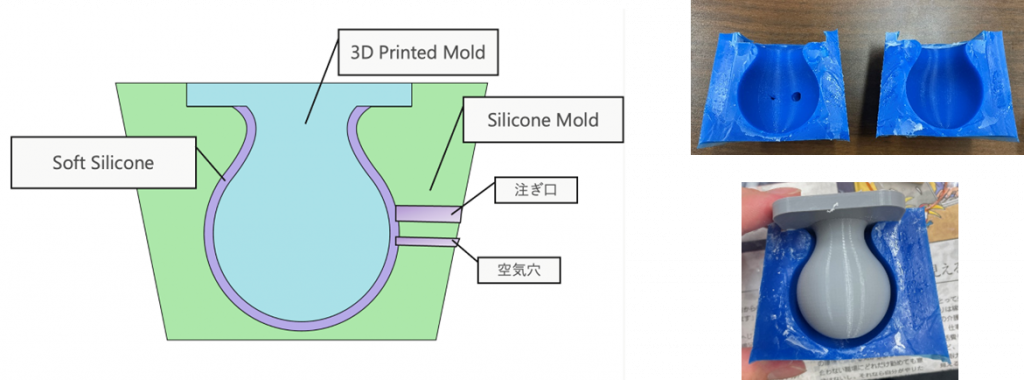
本体上部の柔らかいシリコンは中空である必要があった。そのためシリコン製の外型と3Dプリンタ製の内型で型取りを行なった。また内型によりシリコンの厚さに変化を持たせて、丸みをおびた潰し伸ばしを実現した。
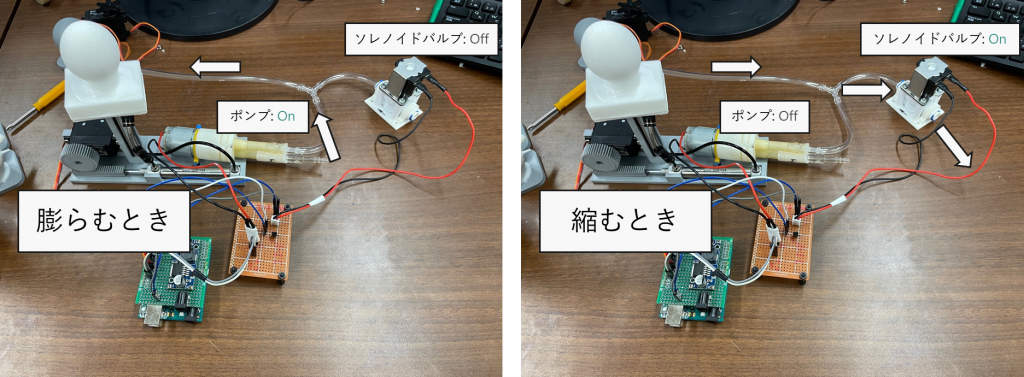
2.3. 膨らみの制御
ポンプとソレノイドバルブにより膨らみを操作した。トランジスタを使ったスイッチング回路を作りArduinoで制御 ソレノイドバルブの栓を開放し、シリコン内部の空気を抜いている。
2.4. 実装した動きのパターン
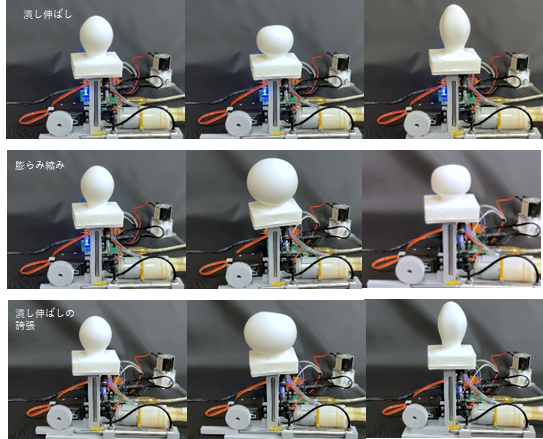
実装した動きのパターンは潰し伸ばし、膨らみ、誇張した潰し伸ばしの3つである。
3. まとめ
3.1. まとめと改善点
本FTMPでは潰し伸ばしと誇張表現が行えるロボットであるMochiの開発を行った。具体的な実装としてはシリコンの実装、機構の実装を行った。改善点としてコンセプトに近く作れたが、エアシリンダの移動距離が短いため、潰しが十分に表現できていない点があげられる。また膨らんでいる状態から空気を抜くとき、ただ栓を開放して抜いているため時間がかかる。さらに本体下部のシリコンが、伸ばし潰しで動いてしまうといった問題点がある。
3.2. 今後
今後あげた改善点の修正を行い、活用に向けた実験を行いたいと考えている。また十分な動作設計が行えていないため、動きの作りこみに取り組んでいきたい。