Member: Youchan Yim.
Keywords: Robotic hands, social touch, and pain relief.
Social touch is a type of physical contact in a person-to-person social relationship and it is an important part of our interaction with others. Diverse psychological positive effects related to social touch have been reported, such as creating bonds, reducing anxiety and also reducing physical pain by holding hands between lovers. In this work, we applied the psychological benefits of social touch to human-robot interaction and developed robotic hands aiming to provide people with a sense of security.
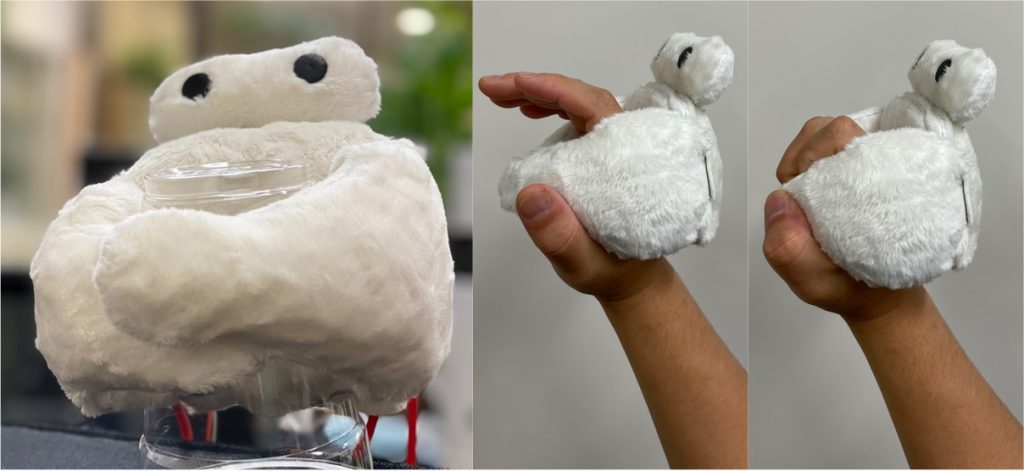
To generate human-robot interpersonal touch, we developed an inflatable hand-held soft robot. Inside the robot were three airbags and a pressure sensor. The exterior of the robot was made of soft fur material. The robot was connected to an external pneumatic system composed of three air pumps and three solenoid valves that were independently controlled by a microcontroller. The wearer’s clench was detected by the pressure sensor. Depending on the control strategy, the three airbags were inflated to provide the wearer with a feeling of being clenched by the robot.
- Youchan Yim, Fumihide Tanaka : Development of Robotic Hands for Pain Reduction by Social Touch, The Proceedings of JSME annual Conference on Robotics and Mechatronics (Robomec) 2019, 1P1-L08, 2019 [pdf at J-STAGE]
- Youchan YIM, Fumihide Tanaka : Human Pain Relief by Simultaneously Grasping and Being Grasped by a Robot Hand, Proceedings of the Annual Conference of JSAI, 2020, Volume JSAI2020, 34th (2020), Session ID 2F1-OS-14-02, Pages 2F1OS1402, 2020 [pdf at J-STAGE]
- Youchan Yim, Fumihide Tanaka : Development of an Inflatable Haptic Device for Pain Reduction by Social Touch, In Companion of the 2021 ACM/IEEE International Conference on Human-Robot Interaction (HRI ’21 Companion), Association for Computing Machinery, New York, NY, USA, 86–88, 2021 [pdf]
- Youchan Yim : Human Pain Relief by Simultaneously Grasping and Being Grasped by an Inflatable Haptic Device, In Companion of the 2021 ACM/IEEE International Conference on Human-Robot Interaction (HRI ’21 Companion), Association for Computing Machinery, New York, NY, USA, 628–629, 2021 [pdf]
(Updated on July 25, 2022)